The resolution of an optical microscope is fundamentally limited by the diffraction of light as it passes through the optical components, particularly the objective lens. Diffraction causes point sources of light to produce blurred images rather than perfect points, affecting the microscope’s ability to distinguish between two closely spaced objects.
Rayleigh’s Criterion for Resolution
Key Question: How close can two point sources be while still being perceived as distinct entities by an optical system?
To answer this, we need to consider two essential aspects of how a lens modifies light:
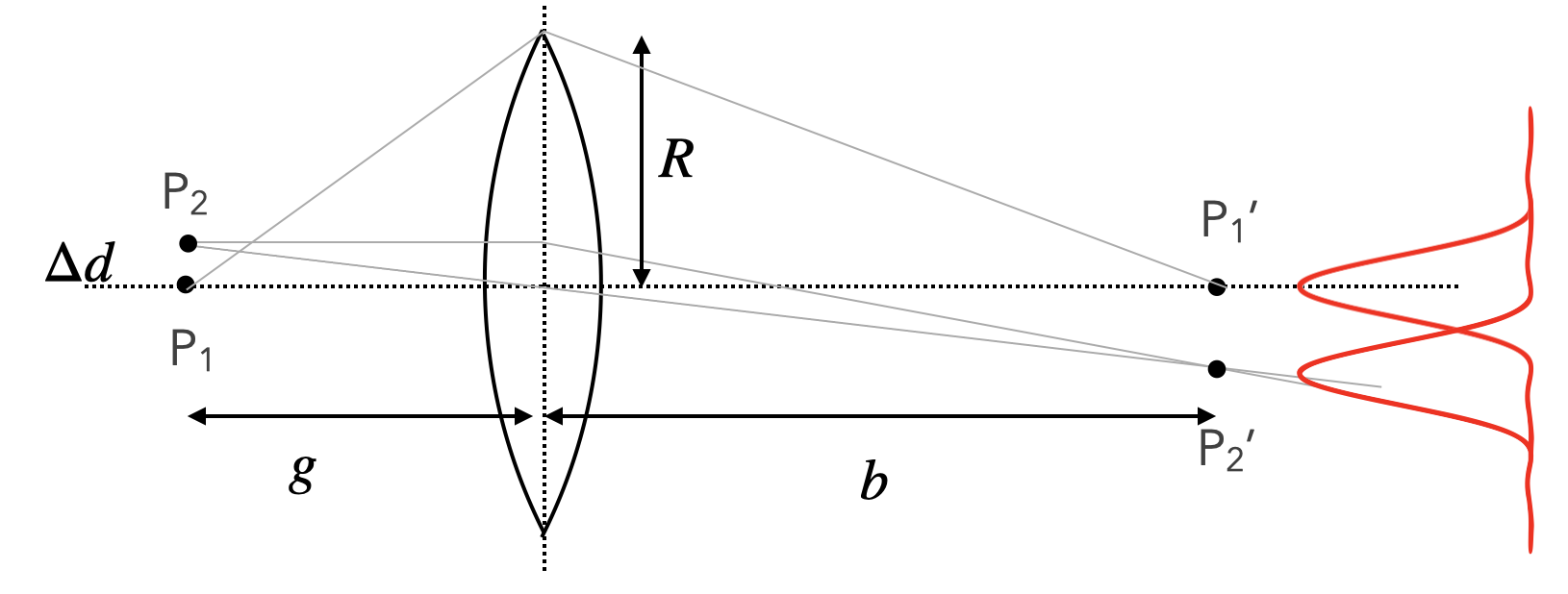
Wavefront Transformation: A lens alters the curvature of incoming wavefronts, focusing parallel rays (plane waves) to a point in the focal plane.
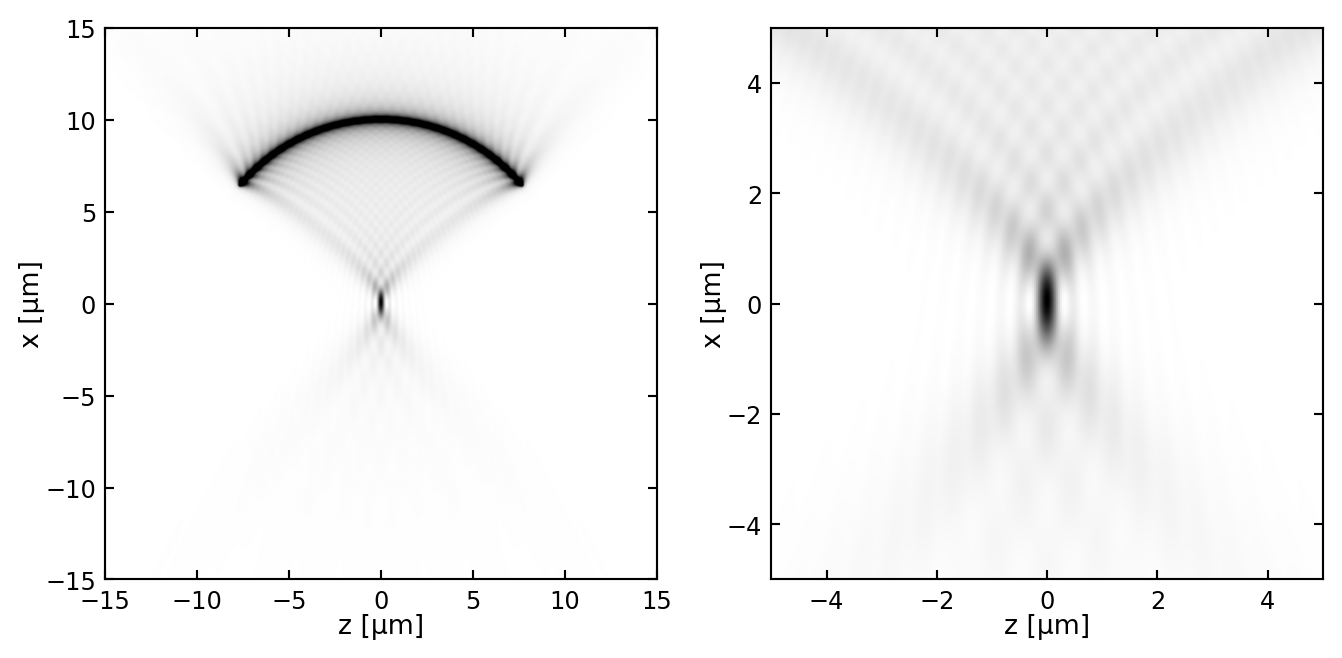
Finite Aperture Effects: The lens has a finite size and acts as a circular aperture, introducing diffraction effects that spread the image of a point source into a diffraction pattern known as the Airy disk.
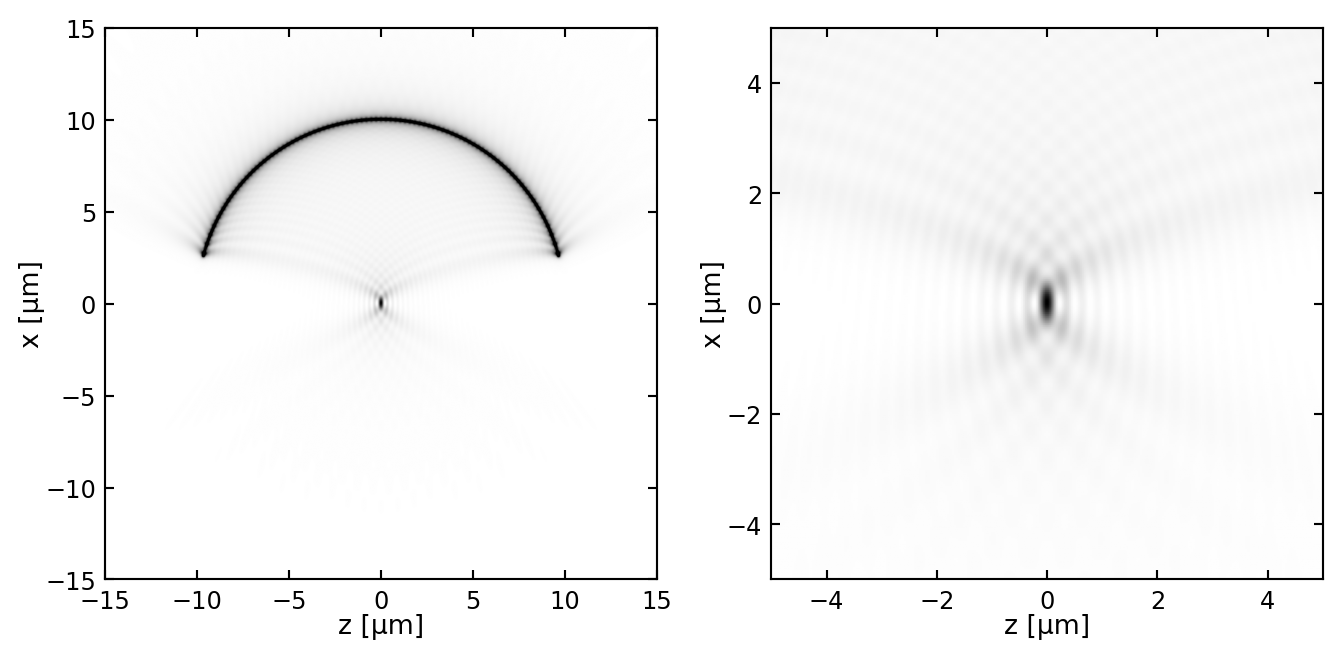
Visual Representation:
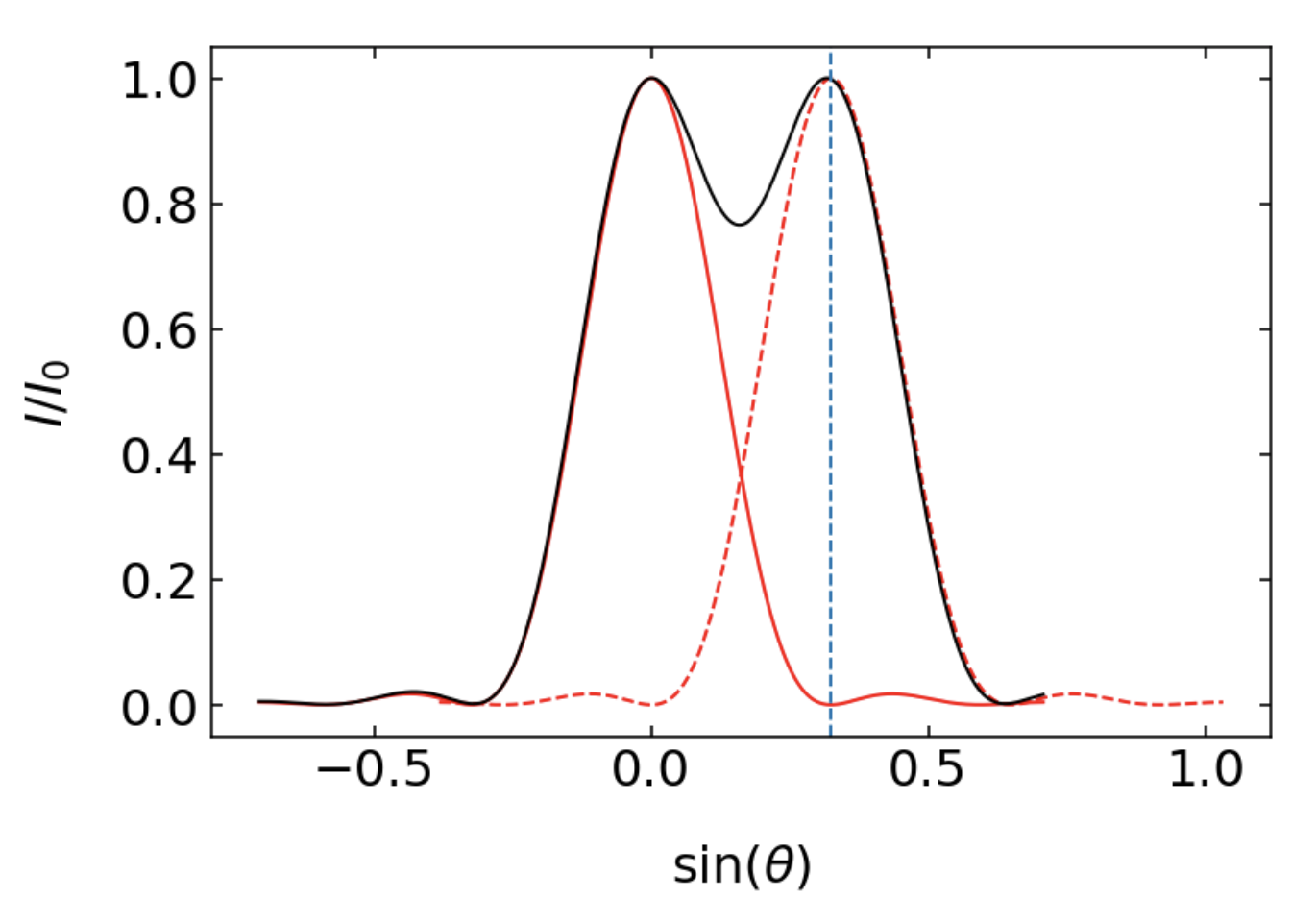
Each point source produces its own diffraction pattern. As the sources move closer, their patterns begin to overlap, making it harder to distinguish between them.
Rayleigh’s Resolution Criterion:
- Two point sources are considered just resolvable when the principal maximum (center) of one Airy pattern coincides with the first minimum (dark ring) of the other.
For incoherent light sources (where the light waves are not in phase), this criterion corresponds to a 26% dip in intensity between the two peaks, which is generally sufficient for the human eye or detectors to distinguish the two sources as separate.
Angle to the First Minimum:
The angle \(\theta_1\) to the first minimum of the diffraction pattern from a circular aperture of radius \(R\) is given by:
\[
\sin(\theta_1) = 1.22\, \frac{\lambda}{2R}
\]
Since the diameter of the aperture \(D = 2R\), this can also be written as:
\[
\sin(\theta_1) = 1.22\, \frac{\lambda}{D}
\]
The factor 1.22 arises from the first zero of the Bessel function \(J_1\) that describes the diffraction pattern of a circular aperture.
Small Angle Approximation:
For small angles (common in optical systems), \(\sin(\theta_1) \approx \theta_1\) in radians.
Relating Angular to Linear Separation in the Image Plane:
The angular resolution \(\theta_1\) corresponds to a linear separation \(\Delta x\) in the image plane (at image distance \(b\)):
\[
\theta_1 = \frac{\Delta x}{b}
\]
Combining the Equations:
Substituting \(\theta_1\):
\[
\frac{\Delta x}{b} = 1.22\, \frac{\lambda}{D}
\]
Solving for \(\Delta x\):
\[
\Delta x = 1.22\, \frac{\lambda b}{D}
\]
Considering the Object Plane:
The magnification \(M\) of the optical system is:
\[
M = \frac{b}{g}
\]
where \(g\) is the object distance. The corresponding separation in the object plane (\(\Delta d\)) is:
\[
\Delta d = \frac{\Delta x}{M} = \frac{\Delta x \, g}{b}
\]
Substituting \(\Delta x\):
\[
\Delta d = 1.22\, \frac{\lambda b}{D} \times \frac{g}{b} = 1.22\, \frac{\lambda g}{D}
\]
Introducing Numerical Aperture (NA):
The numerical aperture (NA) of the lens is defined as:
\[
\text{NA} = n \sin(\alpha)
\]
where:
- \(n\) is the refractive index of the medium between the object and the lens.
- \(\alpha\) is the half-angle of the maximum cone of light that can enter or exit the lens.
Since \(\sin(\alpha) = \frac{R}{g}\), we have:
\[
D = 2R = 2 g \sin(\alpha)
\]
Substituting \(D\) into \(\Delta d\):
\[
\Delta d = 1.22\, \frac{\lambda g}{2 g \sin(\alpha)} = \frac{1.22\, \lambda}{2 \sin(\alpha)} = \frac{0.61\, \lambda}{\sin(\alpha)}
\]
Therefore, incorporating the refractive index \(n\):
\[
\Delta d = \frac{0.61\, \lambda}{n \sin(\alpha)} = \frac{0.61\, \lambda}{\text{NA}}
\]
Under Rayleigh’s resolution criterion, several key factors influence the resolving power of an optical system.
Firstly, a higher numerical aperture (NA) improves resolution. This increase can be achieved by enhancing either the refractive index \(n\) of the medium between the object and the lens or the sine of the collection angle \(\sin(\alpha)\). Since the NA is defined as \(\text{NA} = n \sin(\alpha)\), a larger NA allows the lens to gather more diffracted light, thereby resolving finer details in the image. In air, where the refractive index is approximately \(n \approx 1\), the maximum achievable NA is less than 1, which limits the resolution. This limitation arises because the maximum value of \(\sin(\alpha)\) is 1 (when \(\alpha = 90^\circ\)), so the NA in air cannot exceed 1. In practical systems, the collection angle \(\alpha\) is much less than \(90^\circ\), further reducing the NA and thus the resolution. Immersion lenses, which use a medium with a higher refractive index (such as water or oil), can achieve higher NAs, overcoming this limitation and improving resolution.
Secondly, using shorter wavelengths \((\lambda)\) of light leads to better resolution. According to the formula \(\Delta d = \frac{0.61\, \lambda}{\text{NA}}\), the minimum resolvable distance \(\Delta d\) is directly proportional to the wavelength. Therefore, decreasing the wavelength reduces \(\Delta d\), allowing the optical system to distinguish smaller features of the object.
Two incoherent point sources can be resolved when their minimum separation \(\Delta d\) satisfies:
\[
\Delta d \geq \frac{0.61\, \lambda}{\text{NA}}
\]
Here \(\Delta d\) is the minimum resolvable distance between the two point sources, \(\lambda\) is the wavelength of the light used for imaging, and \(\text{NA} = n \sin(\alpha)\) is the numerical aperture of the optical system, where \(n\) is the refractive index of the medium and \(\alpha\) is the half-angle of the maximum cone of light entering the lens.
Abbe’s Criterion for Resolution
While Rayleigh’s criterion applies to incoherent light sources where intensities add directly, Ernst Abbe developed a complementary theory for coherent imaging in the context of microscopy. Abbe’s approach emphasizes the role of diffracted orders and spatial frequencies in image formation.
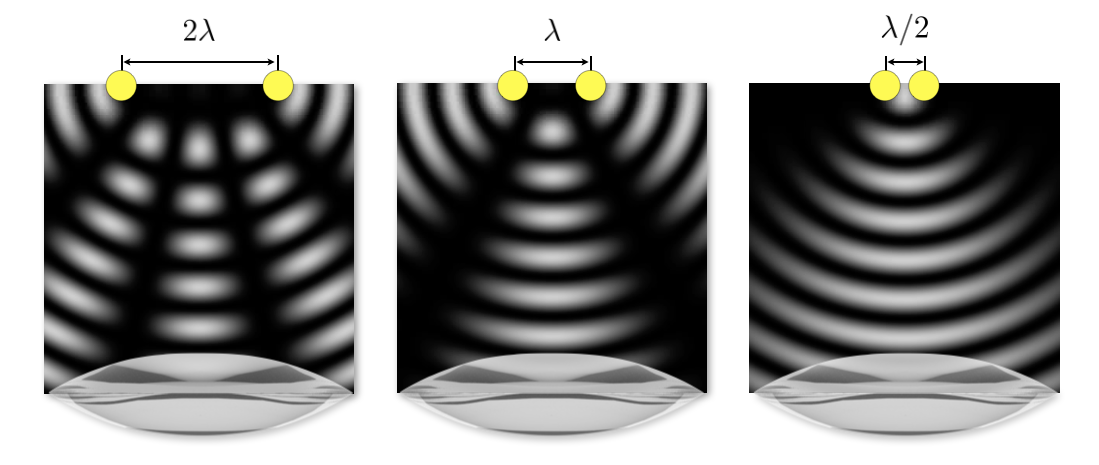
Abbe recognized that an object with fine periodic details acts as a diffraction grating, scattering incident coherent light into multiple diffraction orders: the zeroth order (undiffracted beam), and higher orders (±1st, ±2nd, etc.). Each order carries information about different spatial frequency components of the object. For the optical system to correctly reproduce the image, it must capture at least the zeroth order and one first-order beam. If the objective lens aperture is too small and blocks all first-order diffracted beams, the fine structural details cannot be resolved regardless of magnification.
Consider a periodic structure with spacing \(d\). When illuminated with coherent light of wavelength \(\lambda\), the first diffraction order emerges at angle \(\theta\) satisfying the grating equation \(d \sin\theta = \lambda\). For the objective lens to capture this first order, we require \(\sin\theta \leq \sin\alpha\), where \(\alpha\) is the half-angle of the cone of light accepted by the lens. The smallest resolvable spacing occurs when the first-order beam just enters the lens at its maximum acceptance angle:
\[
d \sin\alpha = \lambda
\]
Since the numerical aperture is \(\text{NA} = n \sin\alpha\) (where \(n\) is the refractive index), this gives:
\[
\Delta d = \frac{\lambda}{n \sin\alpha} = \frac{\lambda}{\text{NA}}
\]
In practical microscopy with oblique illumination or with both transmitted and reflected light beams entering from opposite sides of the optical axis, diffracted orders from both sides can enter the objective. This effectively doubles the range of spatial frequencies captured, improving the resolution by a factor of 2:
\[
\Delta d = \frac{\lambda}{2 \,\text{NA}}
\]
According to Abbe’s theory, the minimum resolvable spacing \(\Delta d\) of a periodic object in a microscope is:
\[
\Delta d = \frac{\lambda}{2 \,\text{NA}}
\]
where \(\lambda\) is the wavelength of light and \(\text{NA}\) is the numerical aperture of the objective lens. This criterion requires that the objective lens captures at least the zeroth-order and one first-order diffracted beam to resolve the periodic structure. The factor of 2 assumes optimal illumination conditions where diffracted orders from both sides of the optical axis can contribute to image formation.
The two criteria approach resolution from different physical perspectives. Rayleigh’s criterion (\(\Delta d = 0.61\lambda/\text{NA}\)) describes when two incoherent point sources become distinguishable based on the overlap of their Airy diffraction patterns, with the factor 0.61 arising from the first zero of the Bessel function \(J_1\). This applies naturally to conventional bright-field microscopy and fluorescence imaging where sources emit independently.
Abbe’s criterion (\(\Delta d = \lambda/(2\text{NA})\)) describes the spatial frequency bandwidth of an optical system for coherent imaging. It requires capturing at least two diffraction orders (zeroth and first) to resolve periodic structures. This framework applies to phase-contrast microscopy, interference microscopy, and other coherent imaging techniques.
Despite their different origins, both criteria reveal the same fundamental scaling: resolution improves linearly with numerical aperture and inversely with wavelength. The numerical factor difference (\(0.61 \approx 1.22/2\) versus \(1/2\)) reflects the different physical scenarios—intensity overlap for incoherent sources versus spatial frequency transmission for coherent illumination. Both confirm that diffraction fundamentally limits optical resolution at \(\Delta d \sim \lambda/\text{NA}\).